iNetic has created the iMR and the iND integrated solution using the Circulo and the Integro drives from Synapticon.
These drive use EtherCAT for communication. But what it is EtherCAT?
EtherCAT is defined by the EtherCAT user group in the IEC-Standard 61158 and defines the bus system and how the drive slave communicates with a master on the physical and basic communication levels.
CANopen is standardized by CiA and the CiA 301 describes the CANopen application layer and the communication profile.
This describes how to transfer content between a master and a slave and how to realize the real time requirements.
CoE specifies how the CANopen protocol is used in the EtherCAT environment.
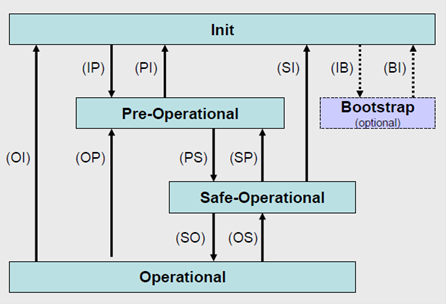
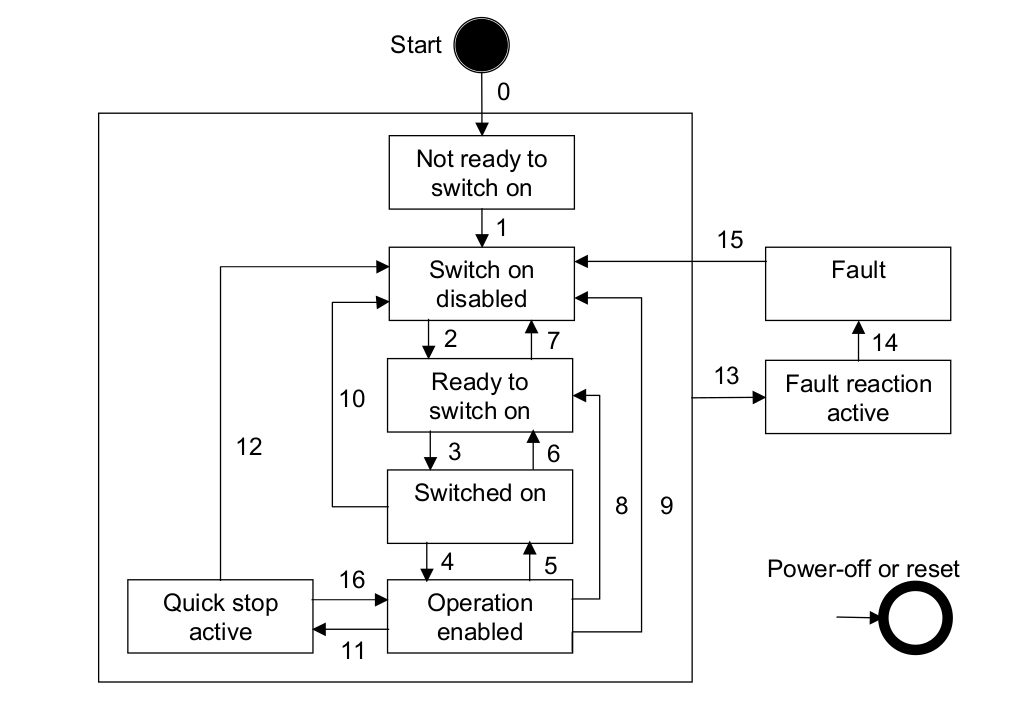
CiA 402 is the device profile for drives and motion control applications. CiA 402 defines how drives communicate with the masters:
The object number designates where to find, or send, the required information and all basic functionality; for example, how to switch on a drive, how to recover faults, drive specific state machines.
Complying with CiA 402 makes drives interchangeable among different manufacturers as all drives work similarly and have the same basic data on the same address. Manufacturer specific areas define how to handle special features.
Masters are based on these standards and offer an abstraction layer; therefore, only minor knowledge about the standards is required. The system offers an interface (usually graphical), so that the system can be configured as needed. The user need not be concerned about protocols, such as starting up the communication, fault and recovery procedures, PDO mapping, and communication supervision, because this is handled by the master. Usually, process values can be set by the user directly through the API of a master software without having to worry about the details.
Nevertheless, having basic knowledge of the basic principles will help to establish the connection with these masters, bug fixing and fault diagnosis.
If a commercial master is not used and the interface to a SOMANET drive is manually implemented or the system is realized with the use of free basic solutions, such as SOEM, a deep knowledge of the standard is required.